二维码

工博士官方客服微信
联系方式
联系方式
电话:18621383605
服务时间 8:30~18:00
返回首页
回到顶部
库卡机器人常见运动指令
2018-01-13 13:58:52
问 学完了库卡机器人的运动指令后,可以了解到哪些?
答(1)通过对机器人几种基本运动指令的学习,能够熟练掌握机器人各种轨迹运动的相关编程操作
(2)通过学习PTP运动指令的添加方法,能够掌握机器人的简单编程
机器人的运动方式:
机器人在程序控制下的运动要求编制一个运动指令,有不同的运动方式供运动指令的编辑使用,通过制定的运动方式和运动指令,机器人才会知道如何进行运动,机器人的运动方式有以下几种:
(1)按轴坐标的运动(PTP:Point-toPoint,即点到点)
(2)沿轨迹的运动:LIN直线运动和CIRC圆周运动
(3)样条运动:SPLINE运动
点到点运动
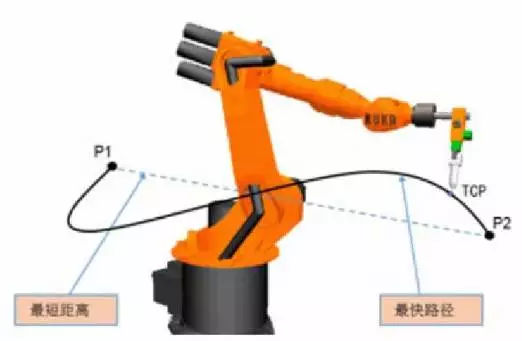
PTP运动是机器人沿*快的轨道将TCP从起始点引至目标点,这个移动路线不一定是直线,因为机器人轴进行回转运动,所以曲线轨道比直线轨道运动更快。此轨迹无法精确预知,所以在调试及试运行时,应该在阻挡物体附近降低速度来测试机器人的移动特性。
线性运动
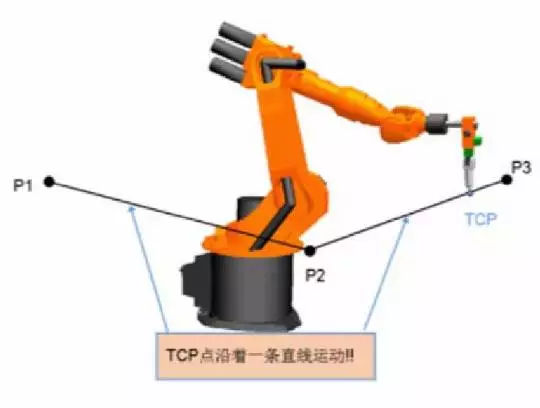
线性运动是机器人沿一条直线以定义的速度将TCP引至目标点。在线性移动过程中,机器人转轴之间进行配合,是工具或工件参照点沿着一条通往目标点的直线移动,在这个过程中,工具本身的取向按照程序设定的取向变化。
圆周运动
圆周运动是机器人沿圆形轨道以定义的速度将TCP移动至目标点。圆形轨道是通过起点、辅助点和目标点定义的,起始点是上一条运动指令以精确定位方式抵达的目标点,辅助点是圆周所经历的中间点。在机器人移动过程中,工具尖端取向的变化顺应与持续的移动轨迹。
样条运动
样条运动是一种尤其适用于复杂曲线轨迹的运动方式,这种轨迹原则上也可以通过LIN运动和CIRC运动生成,但是相比下样条运动更具有优势。
创建以优化节拍时间的运动(轴运动)
1 PTP运动
PTP运动方式是时间*快,也是*优化的移动方式。在KPL程序中,机器人的第一个指令必须是PTP或SPTP,因为机器人控制系统仅在PTP或SPTP运动时才会考虑编程设置的状态和转角方向值,以便定义一个唯一的起始位置。
2 轨迹逼近
为了加速运动过程,控制器可以CONT标示的运动指令进行轨迹逼近,轨迹逼近意味着将不精确到达点坐标,只是逼近点坐标,事先便离开精确保持轮廓的轨迹。
PTP运动的轨迹逼近是不可预见的,相比较点的精确暂停,轨迹逼近具有如下的优势:
(1)由于这些点之间不再需要制动和加速,所以运动系统受到的磨损减少。
(2)节拍时间得以优化,程序可以更快的运行。
创建PTP运动的操作步骤
(1)创建PTP运动的前提条件是机器人的运动方式已经设置为T1运行方式,并且已经选定机器人程序。
(2)操作机器人将TCP移向应被设为目标点的位置。
(3)然后将光标放置在其后应添加运动指令的那一行程序中。
(4)点击菜单序列指令>运动>PTP,作为选项,也可以在相应行中按下软件运动,选完运动指令后,出现PTP指令的联机表单。
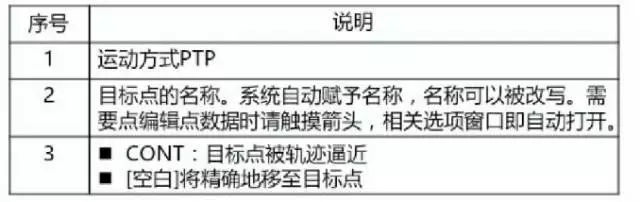
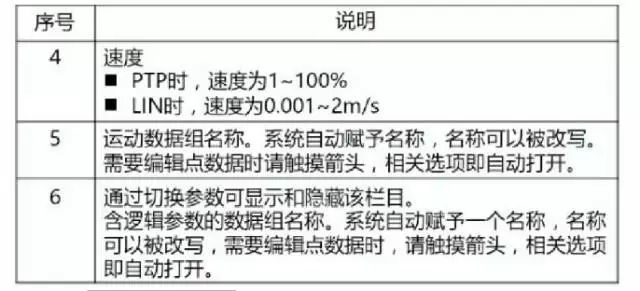
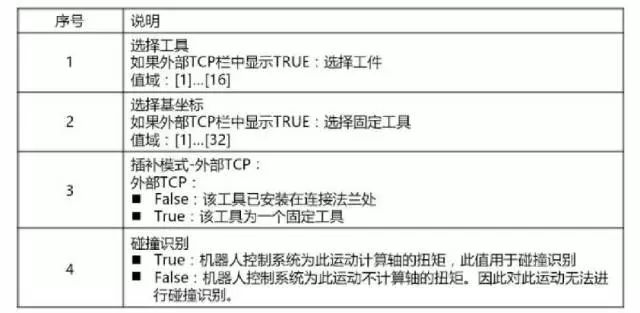
(5)在联机表单中输入参数,各个参数含义如下表所示。
(6)在选项窗口“坐标系”中输入工具和基坐标系的正确数据,以及关于插补模式的数据和碰撞监控的数据。
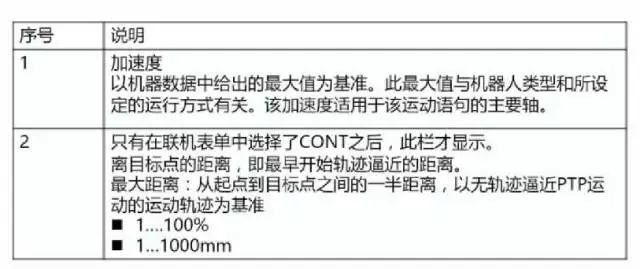
(7)在运动参数选项窗口中可将加速度从*大值降下来。如果已经激活轨迹逼近,则也更改轨迹逼近距离。根据配置的不同,该距离的单位可以设置为mm或%。
(8)点击指令OK保存指令,TCP的当前位置被作为目标示教。
